Collision Sense and Avoid
The ASTM F-38 Committee has issued a published standard for DSA collision avoidance, (F2411-04 DSA Collision Avoidance) that requires a UAV to be able to detect and avoid another airborne object within a range of + or - 15 degrees in elevation and + or -110 degrees in azimuth and to be able to respond so that a collision is avoided by at least 500 ft. The 500 ft safety bubble is derrived from the commonly accepted definition of what constitutes a Near Mid Air Collision. This gives airframe and avionic / DSA electronics manufacturers a target for certification. It is likely that the ASTM standard will be incorporated by reference in eventual FAA certification requirements.
from http://www.uavm.com/uavregulatory/collisionavoidance.html
A very good paper on collision avoidance systems, titled SAFETY ANALYSIS METHODOLOGY FOR UNMANNED AERIAL VEHICLE (UAV) COLLISION AVOIDANCE SYSTEMS, can be see here:
Presentation from USAF AFOSR
from presentation on "Small sense and avoid system" by Dr John F. McCalmont, USAF Research Laboratory at UAV 2007 Conference in Paris.
Above and three images below from a presentation by Col Gary Hopper of the USAF Research Laboratory at the UAV 2007 Conference in Paris
Sense and Avoid system detection test: spot the aircraft against the background.
Sense and avoid prototype systems
Above and below from presentation by Steve Umbaugh on "M2CAS Multi-mode collision avoidance system" at the UAV 2007 Conference in Paris.
Acoustic detection of aircraft and helicopters

This aircraft, seen at the AUVSI Conference 2008 in San Diego, uses several microphones mounted on the protruding rods on the wings to detect aircraft.
NATO FINAS work in the "See and Avoid" area
Above, the requirements on a Sense and Avoid system, as expressed by Captain Thomas Mildenberger of the Airline Pilots "European Cockpit Association" in his presentation at the UAV 2007 Conference in Paris.
Above from the presentation by Commander Max Snow on "NATO developments in sense and avoidfunctional requirements" at the UAV 2007 Conference in Paris.
Collision “Sense and Avoid” capabilities are likely to become an essential feature of an Unmanned Air Vehicle, if it is to operate in commercial air space. Such a system must:
- at least be equivalent to the sense and avoid capabilities of a pilot
- be able to sense other flyingobjects, from hot air balloons to jet fighter planes, in 360 degrees, since a fast flying jet may collide with the slower flying UAV, from any angle
- be capable of operating in diverse environments:
- cloud
- rain
- day and night
- desert sandstorms
- over a temperature range from -40ºC (Arctic conditions) to 50ºC (Sahara)
For more information, see http://www.uavm.com
Collision avoidance using an FMCW RADAR unit
The proposed MIDCAS Project
Download a copy of the MIDCAS Presentation
New Mexico State University sense and avoid activities

New Mexico State University Aerostar UAS currently being used for sense-and-avoid technology demonstrations. From - http://www.auvsi.org/home
Example of a high performance collision sensing system
This is an example of a collision detection system, based on the use of millimetre wave primary and secondary RADAR systems, coupled with a high resolution CCD imager with a zoom lens, to accurately locate an oncoming air vehicle identified by the primary RADAR.
The Microsoft RingCam
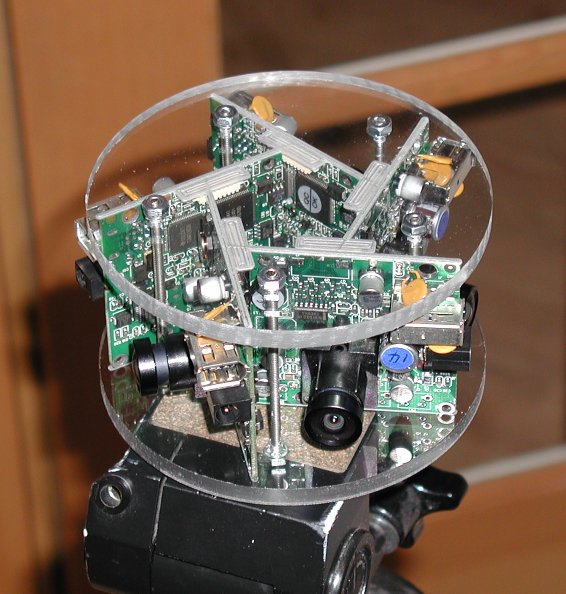
from http://www.humanproductivitylab.com/archive_blogs/2006/06/27/microsoft_announces_roundtable.php
The RingCam is an omnidirectional camera, which captures 360-degrees of video. It is constructed of inexpensive 1394 digital cameras (each 640x480). The RingCam differs from existing omnidirectional cameras, like the OmniCam, in that it is much higher resolution (3000x480), and significantly cheaper. It requires a single 1394 cable to interface to a PC. Images from each camera are stitched together in real-time to form a high resolution panorama.
This camera concept could be used to provide a form of 360 degree visual coverage of the environment outside of the Unmanned Aircraft.
The IAI Hunter Unmanned Aircraft
Below, one can see an example of a way in which a Collision Sense and Avoid radome mounted system can be implemented on a UA, in this case, on a Northrop Grumman / IAI Hunter RQ-5A. Note that this unit is actually a directional radio system, used in a GCS - UA radio link.

The Hunter RQ-5A Tactical Unmanned Air Vehicle in service with the US Army. From http://www.army-technology.com/projects/hunter/
