First Atlantic crossing by an Unmanned Aircraft

Date: 20th August, 1998, Aerosonde UAV flying over calm waters. From www.aerosonde.com.
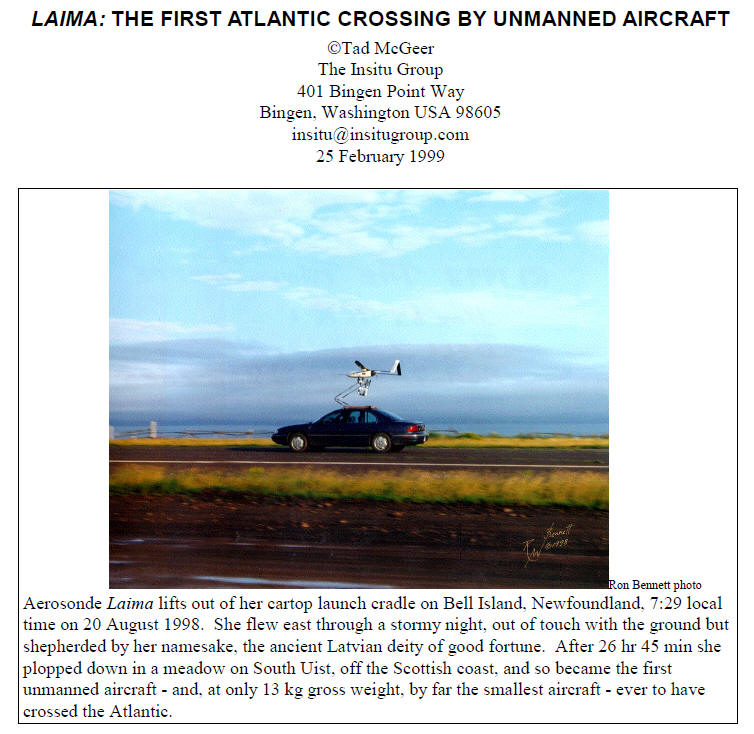
The first UA to cross the Atlantic was the Aerosonde Mark I “Laima” flying from Bell Cross Airport in the USA to the DERA Benbecula Range in the Outer Hebrides, covering 3,270 Km in 26 hours 45 minutes at an altitude of 1,680 m, using only 5.6 Kg of fuel.
"Laima" , named after the LatvianGoddess of good fortune, was one of three Mk I Aerosondes built in Melbourne, Australia by Environmental Systems and Services (ES& S) for the University of Washington, under a contract from the US Office of Naval Research. The Mk I Aerosonde, first defined by Holland, McGeer and Youngren (1992), was developed to operational status by a consortium consisting of ES&S, The Insitu Group from Washington State and The Australian Bureau of Meteorology."
- Dr Greg Holland, CEO, Aerosonde Pty Ltd.

Dr Greg Holland, Professor John Bird and the future Aerosonde "Lawrence Hargrave"
from http://www.ctie.monash.edu.au/hargrave/hargrave_150.html
Background
*Approximate only: Potential variation 3.7 to 4.3 kg fuel used, 540 to 610 km / litre
from www.aerosonde.com

Ray Cooper, Monash University's UA pilot, gets a briefing from Gavin Brett, Lead Development Engineer for Aerosonde Ltd. The stunning long range capability of the Aerosonde is very much a tribute to the skills of Gavin Brett and his ability to improve on the Enya R120 engine.
From http://www.ctie.monash.edu.au/hargrave/hargrave_150.html
The Enya 4 stroke engine and the electrical power generator
As seen at the AUVSI 2008 Conference in San Diego
Aerosonde "Laima" Conquers the North Atlantic
from http://www.ctie.monash.edu.au/hargrave/aerosonde_atlantic.html
Aerosonde "Laima" flew into the record books by making the first crossing of the North Atlantic by a robotic aircraft and becoming the smallest aircraft to make the crossing. This short summary provides the essential components of the flight.
Laima, named after the Latvian Goddess of good fortune, was one of three Phase I Aerosondes built in Melbourne, Australia by Environmental Systems and Services (ES&S) for the University of Washington under a contract from the US Office of Naval Research. The Phase I Aerosonde, first defined by Holland, McGeer and Youngren (1992), has been developed to operational status by a consortium consisting of ES&S, The Insitu Group from Washington State, and the Australian Bureau of Meteorology . The basic characteristics are described in Table 1 and full details can be obtained elsewhere in this web page.
| Aerosonde Specifications | |
|---|---|
| Weight | 13kg |
| Wing Span | 2.9m |
| Engine | 20 or 26 cc, 750 up to 1300 watt |
| Aerosonde Operation | |
| Flight | Autonomous, under Base Command |
| Takeoff | Car roof rack |
| Landing | On belly |
| Navigation | GPS |
| Communications | UHF Radio (current), LEO Satellite to be developed for 1999 |
| Aerosonde Performance | |
| Range | > 3000km |
| Endurance | > 30h |
| Altitude Range | 100 - 4000m |
| Aerosonde Instrumentation | |
| Temperature, Pressure, Humidity | 3 Vaisala RSS901 Sondes ±0.1 o C, ±0.1 hPa, ±2% |
| Wind | Proprietary ±0.5 ms ^-1 |
Table 1. Specifications for the Operational Phase I Aerosonde
Laima's flight commenced at Bell Island Airport using manual control and launch from a car roof rack. Autonomous flight was commanded soon after takeoff. After system checkout, the Aerosonde was sent on its way at 09:59 UTC August 20 1998. Because of the limitations of UHF communications, Laima proceeded to completely robotic mode at 10:37 UTC.
The specified flight plan consisted of a series of way points for a route that went flight slightly south of a great circle (shortest distance) to the landing site at DERA Benbecula Range in the Outer Hebrides (Fig. 1). Altitude was specified at 1680 m dropping to around 150 m on approach to Benbecula. Before launch, complete flight simulations had been made using winds provided by the U.S. NOAA/NCEP model to provide approximate times at each way point.
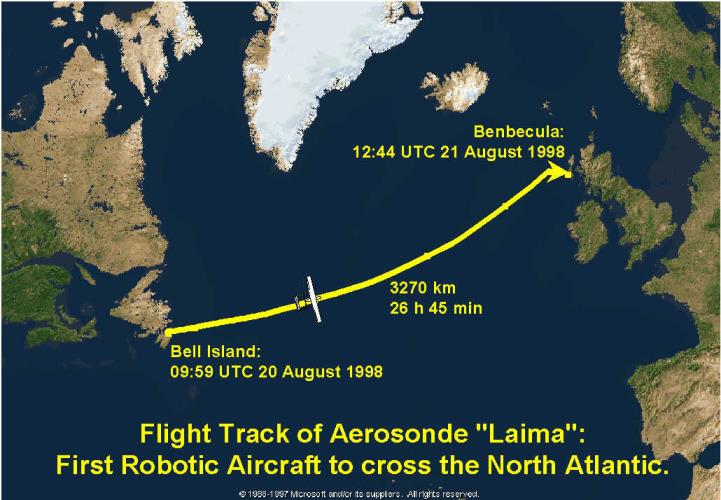
Figure 1: Flight track of Aerosonde Laima: The first robotic aircraft to cross the North Atlantic.
Laima contacted the landing crew at Benbecula at 12:15 UTC, and was brought in to land under manual control at 12:44 UTC. The landing was within 15 minutes of schedule after a flight of 3270 km in a time of 26 h 45 min. The overall statistics for the flight are listed in the next Table.
Flight statistics
| Launch | |
|---|---|
| Place | Bell Island Airport, Newfoundland 47 o 38' N, 52 o 59' W |
| Time | 09:59 UTC August 20 1998 |
| Launch Weight | 13.1kg |
| Fuel | 4.9 kg (7 litres) |
| Landing | |
| Place | DERA Benbecula Range, Outer Hebrides 57 o 21' N, 7 o 23' W |
| Time | 12:44 UTC August 21 1998 |
| Landing Weight* | ~9.1kg |
| Flight Statistics | |
| Elapsed Time | 26h 45m |
| Distance | 3270km (2031 miles) |
| Mean Speed | 120km per hour (75mph) |
| Prescribed Altitude | 1680m (5,520ft) |
| Fuel Used* | ~4kg (5.7 litres, 1.5 US gal, 1.25 imperial gal) |
| Fuel Economy* | ~570km/litre (1350 mile/US gal, 1620 mile/imperial gal) |
*Approximate only: Potential variation 3.7-4.3 kg fuel used, 540-610 km/litre
Table 2: North Atlantic Flight statistics for Aerosonde Laima
The flight track
The flight track took Laima across a weak cold front and along an occluded frontal zone (Fig. 2). Satellite imagery for the period (Fig. 3) indicated that Laima was in moderate to heavy rain for 14-18 hours, or well over half the entire flight. This was the longest sustained period of flight in continuous rain yet experienced by an Aerosonde, and some accumulation of water inside the fuselage was experienced.
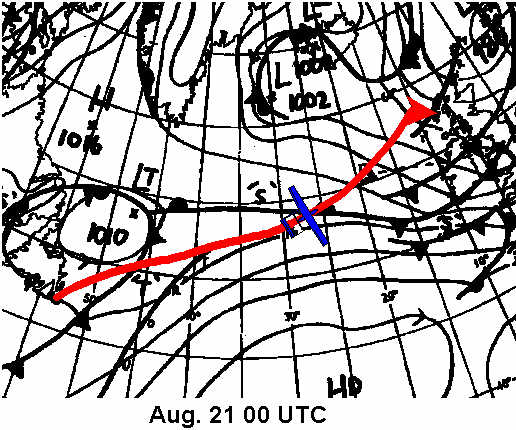
Figure 2: Surface isobaric and frontal analysis from the UK Meteorological Office for 00 UTC on August 21 with the flight track of Laima superimposed. The Aerosonde symbol indicates its location at the analysis time.
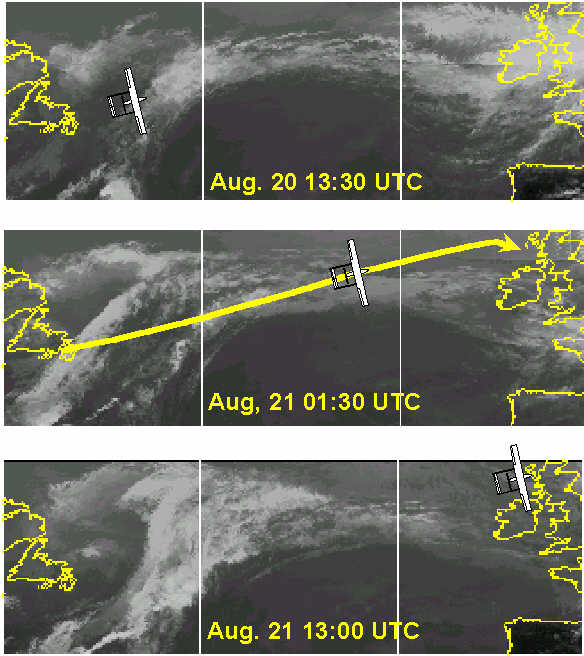
Figure 3: Infrared satellite imagery provided by CIMSS at the University of Wisconsin for 13:30 UTC on August 20 and 01:30 and 13:00 UTC on August 21. Aerosonde symbols indicate the aircraft position at these times and the centre panel has the entire flight track for reference.
Aircraft altitude log
The aircraft stored information on GPS location and altitude, and winds for the entire flight. Unfortunately, temperature and humidity observations were not taken. The time-variation of altitude along the track in Fig. 4 indicates that Laima closely followed its specified flight plan.
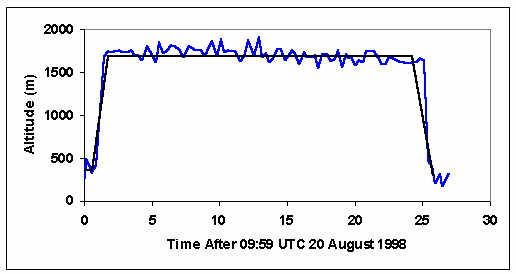
Figure 4: Aerosonde-logged GPS altitude variations (blue curve) during the flight with the prescribed altitude shown by the black curve. The aircraft actually tracked along a more accurate pressure altitude.
Enroute winds (Fig. 5) were always a tailwind and varied from south westerly early in the flight to to northwesterly off Scotland. The maximum winds encountered were over 20 ms-1 (40 kt or 70 km/h) and the wind speed changes associated with passage through the weak frontal zones can be seen near 10 and 20 hours into the flight.
Winds predicted by the flight simulation within the NCEP Aviation Model analysis and forecast field conducted at the final update time are indicated by the heavy lines. These were obtained by linear time interpolation between NCEP analyses at 00 and 12 UTC on August 20 and the 00 UTC analysis and 12 UTC forecast on August 21. The remarkably good agreement between the NCEP winds and those experienced during the flight resulted in the accurate estimation of Laima's arrival time at Benbecula.
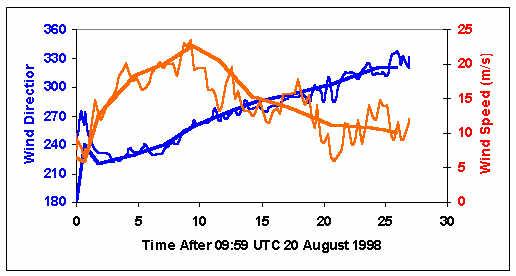
Figure 5: Wind direction (blue) and speed (red) measured by the Aerosonde during the flight. Also shown by the heavy lines are the winds predicted by the flight simulation using the NCEP Aviation Model.
Laima was one of four aircraft launched from Bell Island during the week of 17 August. Piper was lost to what turned out to be a fairly obvious software problem in the transition from manual to automatic control, while Trumper and Millionaire were lost over the North Atlantic. Since we had no enroute communication we do not know why these aircraft failed to arrive, but the fault is presumed to lie with one or another of several low-reliability parts in the current design. These are being redesigned as the development program proceeds.
The North Atlantic crossing by Laima capped a good year for the Aerosonde project. We have just completed a 3-year development program that has provided the Phase I aircraft that completed the transatlantic crossing. Further developments will lead us to a more robust and flexible aircraft for routine operations, with the first aircraft going into operations in 1999.
In preparation for this, we have undertaken 360 h of operations in field exercises off the Australian West Coast (Operational trial for the Bureau of Meteorology), from Vancouver Island (for the Canadian AES), and from Dongsha Island with scientists from Taiwan for the South China Sea Monsoon Experiment. Some general milestones that have been achieved are provided in Table 3.
Milestones achieved
| Total Time in Test and Mission Flights | > 800h, with 550h since August 1997 |
| Field Missions for other Groups in 1998 | > 350h |
| First 24h mission | 21 November 1996 |
| Number of Missions > 24h | 7 |
| Longest Flight | 31h |
| First Completely Autonomous Flight, Including Automatic Takeoff and Landing | 25 February 1998 |
| Regions of Operation to August 1998 | Australia, United States, Canada, Hong Kong, Taiwan, United Kingdom. |
Table 3: Aerosonde Milestones
Acknowledgements
The Atlantic demonstration was possible only because of the efforts of many people and organisations. We would like in particular to thank the staff of Transport Canada, Nav. Canada, the UK Meteorological Office, and the UK Civil Aviation Authority. We are also very grateful indeed to our very gracious and enthusiastic hosts on Bell Island and at the Benbecula Range.
The celebration is tempered with sadness. Sir James Lighthill was a great friend of the project during a difficult early period. He died in July whilst attempting his fifth swim around Sark Island in the English Channel. James would have been delighted to see this success.
The Aerosonde project has received its major funding by an Australian Tax-Syndication Program at Environmental Systems and Services (ES& S), together with grants from the US Office of Naval Research and Department of Energy, and the Australian Bureau of Meteorology. The major sponsors for the North Atlantic Flight were the US Office of Naval Research and ES&S, with additional support provided by the University of Washington, the Insitu Group, the Boeing Co. and L-3 Communications, Conic Division.
Fascinating paper to read on this topic
Aerosonde data
| wingspan | 2.86m |
| length | 1.74m |
| take off weight | 13.1kg |
| frame weight | 6.86kg |
| fuel weight | 4.3kg |
| payload weight | 0.6kg |
| avionics weight | 0.43kg |
| engine capacity | 24cc |
| endurance speed | 121kph |
| cruise speed | 90Kph |
| max speed | 193Kph |
| max altitude | 20,000ft |
| endurance | 27hrs |
| operational range | 3270km |